Robot di động tự trị (AMR): Các loại và Công dụng
Giới thiệu
Bài viết này bao gồm mọi thứ bạn cần biết về robot di động tự trị và việc sử dụng chúng. Bạn sẽ tìm hiểu về:
Tìm hiểu về Robot di động tự trị (AMR)
Robot di động tự trị, hay AMR, là một thiết bị tự cấp nguồn và tự hành được thiết kế để thực hiện các tác vụ lặp đi lặp lại và các chức năng tổ chức bằng hệ thống dẫn đường nội bộ. Những robot này di chuyển trong môi trường của chúng với sự hỗ trợ của các công nghệ phần mềm và bản đồ tiên tiến, cho phép chúng “NHÌN” và thấu hiểu môi trường xung quanh để thực hiện một loạt các nhiệm vụ. Với việc tích hợp các cảm biến, trí tuệ nhân tạo, học máy và các thuật toán máy tính, AMR có thể nhận diện các chướng ngại vật và tránh va chạm một cách hiệu quả.
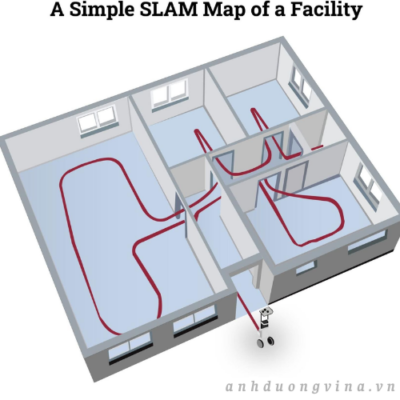
AMR được trang bị các cảm biến liên tục giám sát môi trường xung quanh để xác định các mối nguy hiểm hoặc chướng ngại vật tiềm ẩn. Khi phát hiện các vấn đề như vậy, AMR sẽ tự động tính toán và đi theo một lộ trình hiệu quả để vượt qua chúng. Trong lần triển khai đầu tiên, AMR được cung cấp các công nghệ lập bản đồ như định vị và lập bản đồ đồng thời bằng thị giác (SLAM), tạo điều kiện cho các quyết định điều hướng theo thời gian thực dựa trên các quan sát về môi trường.

AMR thường được mô tả là có khả năng “NHÌN” môi trường xung quanh nhờ việc sử dụng công nghệ phát hiện và đo khoảng cách bằng ánh sáng (LiDAR). LiDAR sử dụng các cảm biến laser xung để xác định khoảng cách, giúp AMR hiểu toàn diện về cả vị trí của chính nó và các vật thể xung quanh. Đóng vai trò là “đôi mắt” của AMR, công nghệ này rất quan trọng để điều hướng chính xác và tương tác trong các môi trường khác nhau.
Có những loại robot di động tự trị nào?
Để đáp ứng nhu cầu tăng trưởng nhanh chóng của các hoạt động phân phối và kho bãi hiện đại, ngành hoàn tất đơn hàng và hậu cần đã ngày càng chuyển sang các giải pháp tự động hóa và robot tiên tiến. Các phương pháp xử lý vật liệu truyền thống, chẳng hạn như lấy hàng thủ công, xe nâng tay và xe nâng do người điều khiển, thiếu tốc độ, hiệu quả và khả năng mở rộng cần thiết để theo kịp các xu hướng thương mại điện tử và bán lẻ đa kênh. Do đó, tự động hóa kho hàng đã phát triển thông qua việc áp dụng các công nghệ robot lập trình bằng máy tính thông minh hơn, linh hoạt hơn để cải thiện thông lượng, độ chính xác và hiệu quả chi phí.
Ban đầu, xe tự hành dẫn đường (AGV) được giới thiệu để hỗ trợ tự động hóa công nghiệp và giải quyết các nhu cầu vận chuyển vật liệu. Các phương tiện này đi theo các lộ trình định sẵn được đánh dấu bằng băng keo, dây dẫn, gương phản xạ hoặc các hệ thống dẫn đường khác để đến đích. Mặc dù AGV đã cải thiện đáng kể việc hoàn tất đơn hàng và giảm lao động thủ công, nhưng chúng bị hạn chế bởi sự phụ thuộc vào cơ sở hạ tầng dẫn đường cố định và không thể tự động thay đổi lộ trình khi đối mặt với các chướng ngại vật bất ngờ hoặc thay đổi bố cục kho hàng.
Với những đột phá trong trí tuệ nhân tạo (AI), học máy và phần mềm robot tiên tiến, các công ty xử lý vật liệu và chuỗi cung ứng đã tiên phong trong việc sử dụng robot di động tự trị (AMR). Không giống như AGV truyền thống, AMR sử dụng các cảm biến tiên tiến, LiDAR, hệ thống thị giác tích hợp và các thuật toán điều hướng thông minh. Điều này cho phép AMR di chuyển tự do trong môi trường kho hàng, tự động lập kế hoạch đường đi và tránh người, máy móc cũng như các chướng ngại vật tiềm ẩn khác một cách an toàn. Kết quả là, robot di động tự trị mang lại một bước tiến đáng kể trong tự động hóa kho hàng có khả năng mở rộng, mang lại tính linh hoạt cao hơn, năng suất được nâng cao và cải thiện lợi nhuận trên vốn đầu tư (ROI).
Mặc dù AMR tương tự như AGV, chúng khác nhau về tính linh hoạt, khả năng thích ứng và mức độ tự chủ. AMR có thể tạo ra các lộ trình tối ưu hóa theo thời gian thực, tìm ra cách hiệu quả nhất để hoàn thành các tác vụ lấy hàng phức tạp hoặc chuyển giao vật liệu, và sửa đổi hành vi dựa trên thông tin thu thập theo thời gian thực. Khả năng lập kế hoạch đường đi tinh vi và bản chất cộng tác của chúng dẫn đến hiệu quả quy trình làm việc vượt trội hơn nhiều, giảm chi phí vận hành và tích hợp liền mạch với các hệ thống quản lý kho (WMS) hiện đại so với các phương pháp thủ công hoặc phương pháp dựa trên AGV truyền thống.
Vận chuyển hàng tồn kho
Việc triển khai các hệ thống tồn kho bằng robot là nền tảng của tự động hóa kho hàng. Các giải pháp này được thiết kế để xử lý các tác vụ lặp đi lặp lại, tốn thời gian mà trước đây tiêu tốn đáng kể giờ làm việc của nhân viên. Nhiều thập kỷ đổi mới đã dẫn đến việc triển khai cánh tay robot, băng tải và máy kiểm tra chất lượng bằng thị giác. Những công nghệ này đã cải thiện căn bản năng suất kho hàng, độ chính xác của đơn hàng và chất lượng sản phẩm, đồng thời giúp các công ty quản lý số lượng đơn vị lưu kho (SKU) cao hơn và kỳ vọng vận chuyển nhanh hơn.
Trong một trung tâm thực hiện đơn hàng hoặc cơ sở phân phối điển hình, các hoạt động cốt lõi bao gồm lưu trữ hàng tồn kho, lấy hàng, bổ sung hàng và chuẩn bị vận chuyển đi. Những tiến bộ trong robot hiện cho phép vận chuyển hàng hóa tự động — giảm thiểu nhu cầu lao động thủ công. AGV và gần đây là robot di động tự trị đóng vai trò then chốt trong môi trường này, tối ưu hóa việc di chuyển hàng hóa, giảm thời gian di chuyển và tăng khả năng mở rộng hoạt động.
Vận chuyển hàng tồn kho hoặc sản phẩm giữa các khu vực khác nhau — chẳng hạn như cầu cảng nhận hàng, lối đi lưu trữ và khu vực vận chuyển — là một chức năng chính trong hậu cần rất phù hợp cho AMR. Lấy hàng (Order picking), một trong những yếu tố tốn nhiều công sức và chi phí nhất của việc hoàn tất đơn hàng, được tinh giản đáng kể với công nghệ AMR. Thay vì công nhân phải đi bộ quãng đường dài, AMR có thể tự động lấy và giao hàng đến cho người nhặt hàng, giảm thời gian di chuyển và nhu cầu lao động. Robot lấy hàng và xe đẩy AMR vận chuyển sản phẩm giữa các trạm làm việc, cho phép quy trình công việc “hàng đến với người” (goods-to-person) giúp tăng tốc độ lấy hàng, độ chính xác và an toàn công thái học cho người lao động. Việc sử dụng tự động hóa mục tiêu này trong hoàn tất đơn hàng giúp tăng tốc đáng kể việc xử lý, thúc đẩy thông lượng và giúp các công ty đáp ứng các tiêu chuẩn giao hàng trong ngày hoặc ngày hôm sau.

Trong phương pháp lấy hàng theo khu vực (zone picking), một AMR sẽ tự động điều hướng đến khu vực kho được chỉ định nơi lưu trữ SKU hoặc mặt hàng yêu cầu. Công nhân trong mỗi khu vực được hướng dẫn bởi danh sách lấy hàng thực tế ảo tăng cường (AR), hệ thống lấy hàng bằng ánh sáng (pick-to-light) hoặc chỉ dẫn bằng giọng nói được tích hợp với bộ điều khiển của AMR. Sau khi mặt hàng được xếp lên, AMR tiếp tục nhiệm vụ tiếp theo của nó — hoặc là giao đến các khu vực hoàn tất đơn hàng bổ sung hoặc đi thẳng đến khu vực đóng gói và vận chuyển. Các AMR được trang bị xe đẩy mô-đun giúp tối ưu hóa việc lấy hàng theo lô, giảm các bước chạm tay trực tiếp và cho phép chuyển tiếp hàng hóa (cross-docking) liền mạch cho các hoạt động tốc độ cao.
Phân loại (Sortation)
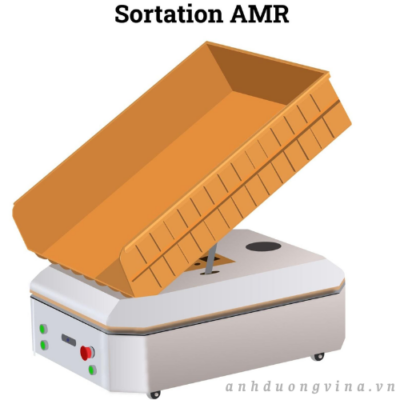
Robot di động tự trị đã trở thành một phần không thể thiếu trong việc phân loại tại kho hàng — một bước thiết yếu trong việc tối ưu hóa thông lượng của cơ sở. AMR phân loại đặc biệt có giá trị đối với các trung tâm chuyển tiếp hàng hóa, trung tâm thương mại điện tử và trung tâm thực hiện đơn hàng bưu kiện. Việc sử dụng chúng bao gồm một loạt các công nghệ xử lý, bao gồm máy phân loại khay nghiêng, hệ thống băng tải và con lăn cơ giới, tất cả đều có khả năng hỗ trợ xử lý đơn hàng khối lượng lớn với tốc độ cao. Các đội tàu AMR nhiều robot có thể tập hợp, phân loại và định tuyến hàng tồn kho tự động đến các máng trượt, làn đường hoặc khu vực chờ vận chuyển được chỉ định, tất cả trong khi cộng tác với những người vận hành và phần mềm kho thông minh.
Các hệ thống AMR hiện đại vượt trội trong cả quá trình phân loại sơ cấp và thứ cấp nhờ tính linh hoạt và khả năng lập trình tùy chỉnh. Các chức năng sơ cấp bao gồm nhận bưu kiện và phân phối chúng vào các thùng hoặc giỏ dựa trên yêu cầu của đơn hàng, trong khi phân loại thứ cấp hợp nhất các mặt hàng để vận chuyển đến khách hàng cuối cùng. Cảm biến thông minh, máy quét mã vạch và theo dõi hàng tồn kho theo thời gian thực đảm bảo tính chính xác, khả năng truy xuất nguồn gốc và khắc phục lỗi nhanh chóng trong quy trình phân loại.
Các AMR phân loại phổ biến được trang bị khay nghiêng hoặc mô-đun băng tải chéo. Chúng cộng tác với công nhân và các máng trượt tự động để đẩy nhanh việc lấy hàng và đóng gói. Khi quét mã vạch sản phẩm, AMR sẽ tự động định vị tại máng trượt chính xác; khay sau đó nghiêng, giải phóng mặt hàng lên băng tải thích hợp hoặc trực tiếp vào thùng chứa đơn hàng. AMR sau đó tự động giao các đơn hàng đã hợp nhất đến bộ phận vận chuyển hoặc khu vực chờ được chỉ định, tích hợp liền mạch với các hệ thống tự động hóa chuỗi cung ứng khác.
Ngoài việc vận chuyển đi, AMR phân loại ngày càng được sử dụng để tự động hóa việc hợp nhất và tổ chức hàng khách hàng trả lại — một lĩnh vực gây kém hiệu quả chính trong các hoạt động truyền thống. Người vận hành nhanh chóng quét các mặt hàng, ghi lại mã số và số lượng mặt hàng, và AMR sẽ định tuyến các sản phẩm trả lại đến các địa điểm lưu trữ hoặc xử lý lại thích hợp. Với phần mềm có thể cấu hình, AMR xử lý hàng trả lại có thể được lập trình lại cho các chức năng kho khác, tối đa hóa tiện ích và giá trị của chúng.
Hàng tồn kho
Kiểm soát hàng tồn kho chính xác và khả năng hiển thị tồn kho theo thời gian thực là rất quan trọng đối với các nhà sản xuất và trung tâm phân phối nhằm tối ưu hóa hiệu suất chuỗi cung ứng. Trong lịch sử, độ chính xác của hàng tồn kho phụ thuộc vào việc kiểm kê thủ công định kỳ — diễn ra hàng quý, nửa năm hoặc hàng năm. Những lần kiểm tra tốn nhiều công sức này đòi hỏi phải đóng cửa hoặc làm chậm hoạt động và thường dẫn đến sai sót liên quan đến hao hụt, thất lạc hoặc lỗi nhập dữ liệu.
Ngày nay, quản lý hàng tồn kho đã được cách mạng hóa bởi robot và tự động hóa kho hàng. Các AMR quét hàng tồn kho triển khai thị giác máy tính, RFID và phân tích tiên tiến để thu thập dữ liệu thời gian thực về vị trí mặt hàng, mức sử dụng không gian kệ và mức tồn kho. Các giải pháp tồn kho AMR xử lý các quy trình như cất hàng (put-away), bổ sung hàng và kiểm kê chu kỳ, sử dụng báo cáo ngoại lệ tích hợp để phát hiện các sai lệch và ngăn chặn tình trạng hết hàng hoặc thừa hàng có thể dẫn đến chậm trễ sản xuất hoặc mất doanh thu.

Một loạt các camera và đầu đọc RFID tinh vi được gắn trên AMR sẽ ghi lại vị trí, mã vạch hoặc mã định danh của mọi SKU mà nó đi qua. Được tích hợp với các hệ thống quản lý kho (WMS), các giải pháp tự trị này cho phép độ chính xác gần như thời gian thực của hàng tồn kho trong kho, hỗ trợ dự báo nhu cầu, tối ưu hóa việc bổ sung hàng và giảm thiểu rủi ro hết hàng hoặc thừa hàng. AMR cũng có thể được triển khai để thực hiện kiểm kê chu kỳ liên tục hoặc theo lịch trình, từ đó cải thiện tính toàn vẹn của dữ liệu và đảm bảo cái nhìn cập nhật về tất cả các sản phẩm, vật liệu hoặc linh kiện được lưu trữ trên nhiều khu vực kho.
Máy quét tồn kho AMR đặc biệt có giá trị trong các trung tâm thực hiện đơn hàng tốc độ cao, nơi nhu cầu kiểm kê chu kỳ tần suất cao là thiết yếu để theo kịp các sản phẩm luân chuyển nhanh và sự gia tăng của các SKU. Khả năng xác định lỗi, xác nhận các hành động cất hàng và đối soát hồ sơ tồn kho kỹ thuật số với hàng hóa vật lý của chúng giúp các quản lý kho giảm thiểu thời gian dừng sản xuất, nâng cao mức độ dịch vụ khách hàng và tránh các tổn thất liên quan đến việc đếm sai hoặc thất lạc mặt hàng.
Cộng tác (Cobot)
AMR cộng tác — hay cobot — được thiết kế để tối ưu hóa hậu cần nội bộ (intralogistics) bằng cách làm việc liền mạch bên cạnh công nhân để hoàn thành một loạt các nhiệm vụ đa dạng. Robot cộng tác được chế tạo với các tính năng an toàn tiên tiến, bao gồm phát hiện chướng ngại vật thông minh, cảm biến giới hạn lực và hệ thống dừng khẩn cấp dự phòng, cho phép tương tác an toàn mà không cần hàng rào bảo vệ thường thấy ở các robot công nghiệp truyền thống. Việc lập trình tinh vi và các tiêu chuẩn an toàn tích hợp đảm bảo cobot có thể thích ứng với các quy trình làm việc thay đổi, khiến chúng phù hợp với các môi trường làm việc hỗn hợp như dây chuyền lắp ráp, khu vực thực hiện đơn hàng hoặc các trạm đóng gói bộ sản phẩm (kitting).
Sự cộng tác giữa Người và AMR dao động từ các tương tác chạm nhẹ đến các không gian làm việc chia sẻ hoàn toàn, nơi robot và con người hoạt động như các nhóm tích hợp. Trong các kịch bản này, AMR cộng tác vận chuyển hàng tồn kho hoặc linh kiện, mang nguồn cung cấp bổ sung đến dây chuyền lắp ráp, hoặc di chuyển hàng hóa đã hoàn thành để kiểm tra lần cuối hoặc vận chuyển. Các AMR được trang bị cho tính năng cộng tác có thể đi theo công nhân khi họ thực hiện lắp ráp hoặc lấy hàng, hỗ trợ xử lý sản phẩm một cách thuận tiện và thậm chí tìm hiểu sở thích của công nhân để cải thiện việc phân công nhiệm vụ trong tương lai.

AMR cộng tác có khả năng thực hiện các quy trình làm việc phức tạp như cất hàng, lấy hàng linh hoạt, kiểm kê hàng tồn kho theo thời gian thực, bổ sung hàng và phân loại đơn hàng. Các quy trình này có thể được tùy chỉnh và tích hợp trong các hệ thống hoạch định nguồn lực doanh nghiệp (ERP) hoặc quản lý kho hàng, mở ra các cấp độ hiệu quả mới. Robot cộng tác không chỉ giảm thời gian đi bộ và sự mệt mỏi cho nhân viên, mà còn giải phóng nhân sự để tập trung vào các hoạt động tạo ra giá trị gia tăng như kiểm soát chất lượng, dịch vụ khách hàng và cải tiến quy trình.
Hiệu suất tối ưu của một robot cộng tác phụ thuộc vào sự tích hợp chặt chẽ với các đối tác con người, những người cung cấp hướng dẫn, bối cảnh và giám sát theo thời gian thực. Không giống như các AMR hoàn toàn tự trị, cobot đóng vai trò là trợ lý robot, điều chỉnh các hành động của chúng để hỗ trợ các mục tiêu của con người trong các ứng dụng kho bãi và sản xuất quan trọng.
Lấy hàng tại khu lưu trữ (Storage Picking)
AMR lấy hàng tại khu lưu trữ ngày càng trở nên thiết yếu đối với các kho hàng tự động, trung tâm thực hiện đơn hàng vi mô (micro-fulfillment) và các hoạt động phân phối xử lý sự đa dạng về SKU cao và tốc độ xoay vòng đơn hàng nhanh. Những robot này được thiết kế để tự động tiếp cận hàng hóa được lưu trữ ở nhiều độ cao kệ khác nhau, thường dựa vào hệ thống kệ chuyên dụng, hệ thống xe tự hành (shuttle) hoặc các mô-đun nâng thẳng đứng. Bằng cách di chuyển qua các lối đi và tích hợp với cơ sở hạ tầng kệ, robot lấy hàng tại khu lưu trữ truy xuất các thùng hoặc giỏ chứa các mặt hàng được đặt — giúp tăng tốc độ hoàn tất đơn hàng và tăng mật độ lưu trữ mà không yêu cầu mở rộng cơ sở tốn kém.
Việc tùy chỉnh kích thước, vị trí và thiết kế của hệ thống kệ là điều kiện tiên quyết để triển khai thành công các giải pháp AMR này. Các yếu tố chính ảnh hưởng đến khả năng mở rộng bao gồm chiều cao trần nhà, chiều rộng lối đi, số lượng robot và sự tích hợp của chúng với các hệ thống khác trên sàn kho, chẳng hạn như mạng lưới băng tải hoặc trạm đóng gói. Các hoạt động có thể dao động từ các địa điểm có một vài robot hỗ trợ lấy hàng tại chỗ đến các trung tâm lớn triển khai hàng chục hoặc thậm chí hàng trăm AMR để thực hiện đơn hàng 24/7. Cách tiếp cận mô-đun cho phép các công ty tăng dần quy mô tự động hóa để đáp ứng sự tăng trưởng và các đợt cao điểm theo mùa.

Ngành Dịch vụ và Khách sạn
Robot di động tự trị không chỉ làm thay đổi các lĩnh vực công nghiệp mà còn cả ngành khách sạn, bán lẻ và chăm sóc sức khỏe. Trong các khách sạn, nhà hàng và bệnh viện, AMR đảm nhận các chức năng như chà sàn tự động, hút bụi, giao đồ ăn thức uống an toàn, vận chuyển khăn trải giường và thu gom rác. Những robot dịch vụ này giúp bù đắp tình trạng thiếu hụt lao động, cải thiện tính nhất quán trong vận hành và nâng cao mức độ dịch vụ bằng cách tự động hóa các tác vụ tẻ nhạt hoặc lặp đi lặp lại. Các ứng dụng AMR phổ biến trong ngành khách sạn bao gồm robot lễ tân, dịch vụ phòng tự động và robot giao hàng thông minh có thể tự điều hướng qua các hành lang và thang máy.
Mặc dù các trường hợp sử dụng AMR tập trung vào dịch vụ khách sạn vẫn đang trong giai đoạn đầu áp dụng, nhưng sự đổi mới liên tục đang nhanh chóng mở rộng khả năng của chúng. Các tính năng như giao hàng không tiếp xúc, giao diện hướng đến khách hàng và tích hợp liền mạch với hệ thống quản lý tài sản khách sạn đang giúp các đơn vị cung cấp dịch vụ khách sạn nâng cao sự hài lòng của khách hàng và hiệu quả vận hành.
Xe nâng
Xe nâng robot di động tự trị (AMR) — bao gồm xe nâng dẫn đường tự động và xe xếp pallet tự hành — thực hiện các chức năng cốt lõi của xe nâng truyền thống do người điều khiển với độ an toàn, hiệu quả và linh hoạt cao hơn. Những xe nâng robot này được thiết kế để di chuyển hàng hóa, xếp chồng pallet, lưu trữ trong kho cao tầng và vận chuyển pallet tự động giữa các cầu cảng bốc hàng, kệ hàng và khu vực vận chuyển. Sử dụng thị giác 3D, LiDAR, cảm biến siêu âm và tránh va chạm bằng AI, xe nâng AMR hoạt động an toàn bên cạnh công nhân và các phương tiện khác mà không cần người lái. Chúng có thể được triển khai để xử lý vật liệu liên tục, không cần người điều khiển qua nhiều ca làm việc, giúp giảm thời gian dừng hoạt động và các rủi ro liên quan đến tai nạn lao động.
Ưu điểm chính của xe nâng AMR bao gồm khả năng tích hợp liền mạch vào các hệ thống quản lý kho và cơ sở hạ tầng hiện có. Phần mềm tích hợp trên xe cho phép thích ứng nhanh chóng với các lộ trình mới, thay đổi vị trí kho bãi hoặc quy trình sản xuất đang phát triển, khiến chúng trở nên lý tưởng cho các môi trường hậu cần năng động. Xe nâng tự hành giao tiếp với các cảm biến hỗ trợ IoT và nền tảng phân tích dựa trên đám mây để cung cấp dữ liệu thời gian thực về hiệu suất kho hàng, biến động tồn kho và nhu cầu bảo trì dự đoán.
Quy trình làm việc trong kho thường yêu cầu điều chỉnh liên tục để thích ứng với các đợt tăng vọt đơn hàng, thay đổi bố cục hoặc các SKU mới. Xe nâng AMR cung cấp khả năng định tuyến lại thông minh tức thời và đưa ra quyết định dựa trên logic để đáp ứng các chỉ thị lấy hàng mới, đảm bảo lộ trình tối ưu và quãng đường di chuyển ngắn nhất. Giống như các loại AMR khác, xe nâng AMR tự “đọc” môi trường của chúng, tận dụng các cảm biến mạnh mẽ để dẫn đường an toàn và hiệu quả. Khi được giao nhiệm vụ mới thông qua hệ thống WMS hoặc ERP, chúng sẽ tự động thực hiện và hoàn thành việc di chuyển vật liệu, giúp tăng năng suất và giảm tổng chi phí sở hữu cho các hoạt động kho bãi.

Robot di động tự trị hoạt động như thế nào?
Robot di động tự trị (AMR) là các phương tiện robot tiên tiến, điều khiển bằng máy tính được thiết kế để điều hướng môi trường của chúng một cách độc lập mà không dựa vào các cơ chế dẫn đường cố định như dây dẫn, gương phản xạ hoặc băng keo. Bằng cách tận dụng một loạt các cảm biến tinh vi tích hợp, trí tuệ nhân tạo (AI), thuật toán học máy (ML) và phần mềm điều hướng hiện đại, AMR tự đánh giá môi trường xung quanh, phát hiện và tránh các chướng ngại vật hoặc con người, đồng thời linh hoạt điều chỉnh lộ trình để hoàn thành hiệu quả các nhiệm vụ được giao trong các môi trường công nghiệp và thương mại phức tạp. Trí thông minh này giúp AMR trở thành công nghệ thiết yếu cho tự động hóa trong hậu cần, kho bãi, sản xuất, chăm sóc sức khỏe và tối ưu hóa chuỗi cung ứng, cung cấp các giải pháp có khả năng mở rộng cho việc xử lý vật liệu và hậu cần nội bộ.
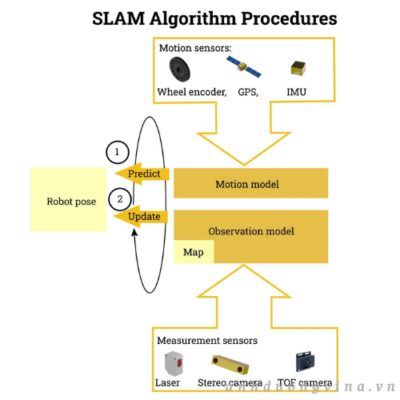
Định vị và lập bản đồ đồng thời (SLAM)
AMR xác định và lập bản đồ môi trường của chúng, cho phép chúng “nhìn” và nhận diện các yếu tố chính như tường, thiết bị, cột và kệ hàng. Chúng đạt được khả năng điều hướng tự trị thông qua Định vị và lập bản đồ đồng thời (SLAM), một tập hợp các thuật toán và kỹ thuật kết hợp cảm biến cho phép robot di động tạo ra một bản đồ kỹ thuật số đồng thời hiểu được vị trí của chính nó trong bản đồ đó. SLAM là nền tảng cho việc điều hướng tự trị trong các hệ thống robot, cho phép điều hướng trong các bối cảnh năng động hoặc không có cấu trúc thường thấy ở các kho hàng và trung tâm phân phối.
SLAM bao gồm các thuật toán định vị và lập bản đồ khác nhau, bao gồm Graph SLAM, Extended Kalman Filter (EKF) SLAM, Fast SLAM, Topological SLAM, Visual SLAM, cũng như SLAM dựa trên LiDAR 2D và 3D, và Oriented FAST and Rotated BRIEF (ORB) SLAM. Mỗi kỹ thuật này được điều chỉnh cho các ứng dụng robot và cấu hình cảm biến khác nhau, nhưng mục tiêu cốt lõi vẫn giữ nguyên: liên tục cập nhật bản đồ không gian trong khi xác định chính xác vị trí (tư thế) và quỹ đạo của robot. Khả năng mạnh mẽ này đóng vai trò then chốt trong việc tối ưu hóa lập kế hoạch đường đi, tránh va chạm và thực hiện nhiệm vụ tự động trong các môi trường năng động trong nhà hoặc ngoài trời.
Mặc dù khái niệm SLAM đã được minh họa trong khoa học viễn tưởng trong nhiều thập kỷ, nhưng việc triển khai thực tế chỉ trở nên khả thi với những tiến bộ trong tính toán nhúng tốc độ cao, các cảm biến độ chính xác cao giá cả phải chăng (như LiDAR và camera RGB-D) và xử lý dữ liệu thời gian thực. Hiệu quả và độ tin cậy của SLAM phụ thuộc vào các phương pháp xử lý tín hiệu cảm biến sáng tạo và tối ưu hóa biểu đồ tư thế (pose graph optimization), cả hai đều thiết yếu để giảm sai lệch định vị và đảm bảo độ chính xác của bản đồ.
Tối ưu hóa biểu đồ tư thế (PGO)
Tối ưu hóa biểu đồ tư thế (PGO) là một kỹ thuật quan trọng trong robot và thị giác máy tính được sử dụng để tinh chỉnh các vị trí và hướng được tính toán — gọi là tư thế (pose) — của một robot di động tự trị hoặc hệ thống camera. Chức năng cốt lõi của PGO là giảm thiểu sai số trong việc ước tính tư thế bằng cách xem xét các mối quan hệ không gian và các ràng buộc có được từ cảm biến như phép đo đường đi (odometry) và đóng vòng lặp (loop closures). Trong một biểu đồ tư thế, các nút tương ứng với các ước tính tư thế, trong khi các cạnh đại diện cho các ràng buộc không gian hoặc các mối quan hệ đo lường giữa các tư thế đó.
Ràng buộc odometry đại diện cho chuyển động của robot giữa các tư thế tuần tự, trong khi đóng vòng lặp xác định các điểm mà AMR quay lại các vị trí đã được lập bản đồ trước đó. Bằng cách nhận diện và hiệu chỉnh các vòng lặp này, thuật toán PGO đảm bảo tính nhất quán và giảm thiểu sai lệch tích tụ, từ đó cải thiện độ chính xác của bản đồ. Các phương pháp tối ưu hóa biểu đồ tư thế là không thể thiếu cho các ứng dụng yêu cầu tính tự chủ lâu dài, điều hướng chính xác và vận hành đáng tin cậy trong các cơ sở lớn, nhà máy sản xuất tự động và các môi trường chuỗi cung ứng phức tạp.
Lập bản đồ
Giai đoạn đầu tiên của việc triển khai AMR liên quan đến việc lập bản đồ môi trường mạnh mẽ bằng SLAM. Trong quá trình vận hành thử, người điều khiển sẽ dẫn dắt robot — thường thông qua cần điều khiển hoặc điều khiển từ xa — đi qua cơ sở vận hành, kho hàng hoặc nhà máy. Khi di chuyển, bộ cảm biến tiên tiến của AMR, bao gồm máy quét LiDAR, camera 3D và cảm biến siêu âm, sẽ ghi lại chính xác vị trí của các bức tường, máy móc, thiết bị và các cấu trúc bất động khác. Quá trình này tạo ra một bản đồ kỹ thuật số chi tiết, độ phân giải cao (mô hình môi trường) phù hợp để hỗ trợ tối ưu hóa lộ trình phức tạp và phân công nhiệm vụ cho tự động hóa công nghiệp.
Khi không gian làm việc thay đổi — do thay đổi bố cục hoặc bổ sung tài sản mới — hệ thống SLAM cho phép cập nhật bản đồ tức thời, đảm bảo AMR duy trì một đại diện an toàn và chính xác nhất về môi trường làm việc của chúng. Tính linh hoạt của phương pháp này đặc biệt có giá trị đối với sản xuất tinh gọn (agile manufacturing), các trung tâm thực hiện đơn hàng hoặc bất kỳ bối cảnh nào thường xuyên cấu hình lại không gian.
Trong quá trình lập bản đồ, AMR tập hợp một đám mây điểm (point cloud) bao gồm hàng triệu điểm dữ liệu không gian 3D, mỗi điểm đại diện cho khoảng cách và vị trí tương đối của các đặc điểm và vật thể trong môi trường. Đám mây điểm này, thường được tăng cường bằng nhãn ngữ nghĩa và nhận diện đặc điểm, là nền tảng cho việc định vị chính xác và cho phép robot theo dõi vị trí và hướng của nó khi di chuyển — hỗ trợ lập kế hoạch đường đi liên tục và điều hướng thông minh, thích ứng.
Định vị
Lập bản đồ mới chỉ là nền tảng; định vị hiệu quả và mạnh mẽ là bước quan trọng tiếp theo để vận hành hoàn toàn tự trị. Khi một AMR đã lập bản đồ không gian làm việc của mình, công nghệ SLAM cung cấp khả năng định vị thời gian thực thiết yếu, cho phép robot xác định vị trí chính xác của nó so với môi trường đang thay đổi nhanh chóng. Bước này là cơ bản cho việc lập kế hoạch đường đi dự đoán, điều phối quy trình làm việc được tối ưu hóa và an toàn trong robot cộng tác (cobot).
Để định vị hiệu quả, AMR tích hợp dữ liệu từ nhiều phương thức cảm biến tiên tiến — camera độ nét cao (hệ thống thị giác), LiDAR, cảm biến đo khoảng cách siêu âm và khi có thể, dữ liệu hệ thống định vị toàn cầu (GPS) để theo dõi khu vực rộng hơn. Các thuật toán định vị giải mã các khung hình camera tuần tự (thường là 30 FPS hoặc cao hơn để phản ứng với độ trễ thấp) và các phép đo cảm biến để khớp các đặc điểm với bản đồ kỹ thuật số, giải mã vị trí không gian và cập nhật trạng thái của chúng trong thời gian thực. Quá trình liên tục này giúp AMR thích ứng với các chướng ngại vật động, định tuyến lại khi có sự hiện diện của con người hoặc thiết bị di động, đồng thời duy trì hiệu quả vận hành và an toàn.
Các hệ thống AMR hiện đại cũng có thể kết hợp tính toán biên (edge computing) và xử lý dựa trên đám mây để tăng cường hơn nữa độ chính xác định vị và khả năng mở rộng, cho phép quản lý đội xe liền mạch và tích hợp với các hệ thống quản lý nhà máy, hệ thống quản lý kho (WMS) hoặc các nền tảng hoạch định nguồn lực doanh nghiệp (ERP).
Visual SLAM
Visual SLAM (vSLAM) là một phương pháp điều hướng hiện đại tận dụng đầu vào từ các cảm biến dựa trên thị giác — từ một camera đơn sắc đơn lẻ đến các hệ thống thị giác đa ống kính, RGB-D và stereo tinh vi. Những cảm biến quang học này cung cấp thông tin hình ảnh chi tiết về môi trường xung quanh trực tiếp của robot, hỗ trợ phát hiện đặc điểm thời gian thực, nhận dạng mốc và lập bản đồ môi trường. Các thuật toán Visual SLAM, chẳng hạn như PTAM và ORB-SLAM, được sử dụng để lập bản đồ thưa thớt và khớp điểm đặc điểm, trong khi các phương pháp dày đặc như DTAM, LSD-SLAM, DSO và SVO sử dụng cường độ hình ảnh và dữ liệu chiều sâu để lập bản đồ và định vị dày đặc, toàn diện.
Công nghệ này vô cùng quý giá đối với các môi trường có nhiều tham chiếu hình ảnh, hỗ trợ các tác vụ như nhặt hàng bằng robot, truy xuất hàng hóa, kiểm tra trên dây chuyền và cộng tác giữa người và robot trong các nhà máy thông minh, trung tâm thực hiện thương mại điện tử và bản sao kỹ thuật số (digital twins) cho các sáng kiến Công nghiệp 4.0.
Định vị và lập bản đồ bằng ánh sáng (LiDAR SLAM)
SLAM dựa trên LiDAR kết hợp quét laser với các thuật toán tiên tiến để đạt được các phép đo khoảng cách 2D và 3D chính xác đến từng điểm, khiến nó trở thành lựa chọn ưu tiên cho các AMR tốc độ cao, phương tiện tự hành và robot trong các môi trường yêu cầu phát hiện chướng ngại vật và tránh va chạm độ chính xác cao. LiDAR là trọng tâm của việc tạo ra đám mây điểm, cho phép lập bản đồ môi trường và định vị chính xác bằng cách khớp các số đọc cảm biến mới với bản đồ hiện có bằng các phương pháp như Iterative Closest Point (ICP) và Normal Distributions Transform (NDT). Những đám mây điểm phong phú này được lưu trữ dưới dạng bản đồ lưới (grid) hoặc voxel để mô hình hóa không gian độ phân giải cao.
Để đạt được độ chính xác và tin cậy tối ưu, LiDAR thường được tích hợp với các công nghệ đo lường bổ trợ như phép đo quãng đường qua bánh xe (wheel odometry), đơn vị đo lường quán tính (IMU) và hệ thống vệ tinh định vị toàn cầu (GNSS). Ở những khu vực có ít đặc điểm hình ảnh hoặc hình học — như không gian mở rộng lớn, kho hàng với kệ thưa thớt hoặc hành lang — sự kết hợp đa cảm biến đảm bảo định vị và điều hướng mạnh mẽ, không gián đoạn.
Bằng cách kết hợp thị giác, LiDAR và các cảm biến biên, AMR đạt được tính linh hoạt và tự chủ vô song, thúc đẩy những tiến bộ hiện đại trong robot di động trên khắp các ngành công nghiệp.
Câu hỏi thường gặp Robot di động tự trị (AMR) là gì?
AMR là một robot tự cấp nguồn, có khả năng điều hướng trong môi trường của nó bằng các cảm biến tích hợp, AI và phần mềm lập bản đồ để thực hiện các tác vụ lặp đi lặp lại hoặc phức tạp một cách tự động, đồng thời phát hiện và tránh chướng ngại vật.
AMR điều hướng và tránh chướng ngại vật bằng cách nào? AMR sử dụng các cảm biến tiên tiến như LiDAR và camera kết hợp với các thuật toán SLAM để lập bản đồ xung quanh, định vị theo thời gian thực và tự động lập các lộ trình hiệu quả nhằm tránh các chướng ngại vật hoặc mối nguy hiểm được phát hiện.
Các ứng dụng chính của AMR trong kho hàng là gì? AMR hỗ trợ vận chuyển hàng tồn kho, phân loại, lấy hàng tại khu lưu trữ, kiểm kê chu kỳ và hoàn tất đơn hàng. Chúng tối ưu hóa quy trình làm việc bằng cách tự động di chuyển hàng hóa giữa các khu vực, lấy hàng và cộng tác với công nhân.
Các AMR cộng tác (cobot) tương tác với con người như thế nào? Cobot được chế tạo với các tính năng an toàn tiên tiến, cảm biến giới hạn lực và phát hiện chướng ngại vật theo thời gian thực, cho phép chúng chia sẻ không gian làm việc một cách an toàn và thích ứng với sở thích của con người trong các hoạt động hỗn hợp tác vụ.
Những công nghệ nào cho phép định vị AMR chính xác? AMR sử dụng sự kết hợp cảm biến (sensor fusion) từ LiDAR, camera, máy đo khoảng cách siêu âm và thuật toán SLAM. Các kỹ thuật như tối ưu hóa biểu đồ tư thế (pose graph optimization) và SLAM thị giác hoặc LiDAR đảm bảo định vị và điều hướng chính xác, không bị sai lệch.
AMR được sử dụng ở đâu ngoài kho hàng? AMR được sử dụng trong ngành khách sạn, bán lẻ và chăm sóc sức khỏe cho các chức năng như vệ sinh bằng robot, giao đồ ăn tự động, theo dõi hàng tồn kho và dịch vụ khách hàng để thúc đẩy hiệu quả vận hành và tính nhất quán của dịch vụ.
Một số robot di động tự trị hàng đầu là gì?
MiR600 MiR600 được trang bị công nghệ quét laser tiên tiến, cung cấp tầm nhìn 360° để đảm bảo an toàn tối ưu. Nó có thể tự động lấy, vận chuyển và dỡ các pallet mà không cần thêm hệ thống dẫn đường. MiR600 hỗ trợ tải bản đồ cơ sở thông qua tệp CAD hoặc có thể tự tạo bản đồ riêng. Đây là AMR đạt chuẩn IP52, có khả năng bảo vệ chống lại các hạt bụi và giọt nước. MiR600 có thể hoạt động gần hàng rào và các cổng mở. Nó được điều khiển thông qua giao diện MiR Robot trực quan có thể truy cập qua điện thoại thông minh, máy tính bảng hoặc PC, và có thể dễ dàng lập trình mà không cần kinh nghiệm trước đó.
MiR250 Hook
MiR250 Hook được thiết kế để kéo các sản phẩm nặng trong môi trường sản xuất hoặc di chuyển xe đẩy trong bệnh viện. Nó có thể hỗ trợ tải trọng lên đến 500 kg (1100 lbs.), mang lại một giải pháp hậu cần linh hoạt. MiR250 Hook nhận diện xe đẩy bằng AprilTags và vận chuyển chúng đến các địa điểm đã định trước. Các lệnh cho MiR250 Hook có thể được điều chỉnh nhanh chóng bằng điện thoại thông minh hoặc máy tính bảng thông qua Wi-Fi tiêu chuẩn. Phần đế chắc chắn giúp tăng cường khả năng cơ động và hiệu suất.
OPEX® Sure Sort
Hệ thống OPEX Sure Sort cung cấp một giải pháp có khả năng mở rộng và tiết kiệm chi phí cho các đơn hàng nhiều dòng, phân loại kiện hàng và hậu cần ngược. Nó xử lý hiệu quả các kiện hàng nhỏ với nhiều hình dạng khác nhau, trọng lượng lên đến 5 pound. Hệ thống giảm thiểu việc xử lý kiện hàng với đường hầm quét sáu mặt, có khả năng đọc mã vạch từ mọi góc độ. Sure Sort phù hợp cho các doanh nghiệp nhỏ tìm kiếm sự hợp lý về chi phí hoặc các doanh nghiệp lớn nhằm tối ưu hóa hoạt động. Trong hệ thống Sure Sort, các mặt hàng được đặt trên một băng tải di chuyển qua đường hầm quét. Một iBOT, một phương tiện đa hướng, sau đó sẽ đặt các mặt hàng vào các thùng được chỉ định. Khi một thùng đã đầy tất cả các mặt hàng cho một đơn hàng, người vận hành sẽ được thông báo rằng đơn hàng đã sẵn sàng để đóng gói và vận chuyển.
Kivnon K55 Pallet Stacker
Máy xếp pallet K55 được thiết kế để di chuyển và xếp các tải trọng pallet ở độ cao thấp và có thể thực hiện các lộ trình lặp lại hoặc có điều kiện bằng cách tương tác với các AMR, hệ thống và con người khác. Đây là giải pháp tự động hiện đại để vận chuyển và sắp xếp các đơn hàng pallet trọng lượng trung bình. Máy xếp pallet K55 có thể thích ứng với bất kỳ ứng dụng lưu trữ pallet, tiếp nhận hàng hóa và hệ thống xử lý vật liệu nào. Nó tối ưu hóa không gian lưu trữ và cải thiện hiệu quả quy trình. K55 có thể nâng 1000 kg (2204 lbs.) lên độ cao một mét. Nó sử dụng phần mềm lập bản đồ và có độ chính xác cực cao. Để an toàn, K55 có máy quét laser 360° với PLC an toàn, tín hiệu LED và màn hình cảm ứng phía trước để theo dõi trạng thái AMR, các lỗi tiềm ẩn và mạch điện.
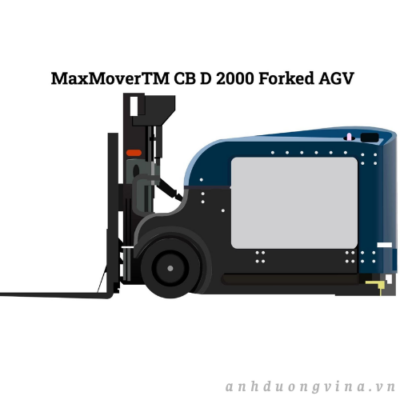
MaxMover CB D 2000
MaxMover CB D 2000 là một xe nâng đối trọng có khả năng cơ động cao, có thể xoay tại chỗ để đạt được sự linh hoạt vượt trội. Hệ thống an toàn tiên tiến của nó giúp ngăn ngừa quá tải, đẩy hoặc kéo tải đột ngột. Với tải trọng tối đa 4.409 lbs (2.000 kg), nó đủ linh hoạt để xử lý các loại hàng nặng khác nhau ngoài pallet. MaxMover CB D 2000 sở hữu tốc độ nâng và khả năng leo dốc ấn tượng, trở thành một sự bổ sung giá trị cho bất kỳ hệ thống kho bãi nào. Sức mạnh và độ bền của nó cho phép dễ dàng đạt tới độ cao 16 ft (5.000 mm). Nhìn chung, MaxMover CB D 2000 cung cấp một giải pháp hiệu quả và tiết kiệm chi phí cho các nhu cầu xử lý vật liệu.
Agilox Omnidirectional Dolly Mover (ODM)
ODM được thiết kế để vận chuyển các thùng nhựa (totes) hoặc tải trọng nhỏ nặng tới 300 kg (661 lbs.), lý tưởng cho ngành điện tử và dược phẩm. Nó có thể hoạt động trong không gian làm việc mà không yêu cầu sửa đổi nhờ hệ thống dẫn động đa hướng, cho phép điều hướng mượt mà vào các lối đi kệ hẹp và quay đầu tức thì. ODM có hệ thống tìm đường tiên tiến giúp tránh chướng ngại vật và con người. Nếu một lộ trình bị chặn hoặc không thể đi qua, ODM sẽ nhanh chóng tính toán lại một đường đi thay thế hiệu quả để hoàn thành nhiệm vụ. Một tính năng nổi bật của ODM là ứng dụng bầy đàn (swarm application), cho phép một đội tàu ODM giao tiếp và chia sẻ dữ liệu, tăng cường sự phối hợp và hiệu quả.
Những lợi thế của robot di động tự trị là gì?
Mục tiêu chính của ngành công nghiệp AMR là tăng cường hiệu quả của nhân viên trong các nhiệm vụ như lấy hàng, xác định vị trí và di chuyển sản phẩm cũng như hàng tồn kho. Bằng cách hoạt động liên tục, AMR giúp giảm thiểu thời gian dừng và thúc đẩy năng suất. Hơn nữa, các AMR lấy hàng mang lại độ chính xác cao, giúp giảm khả năng khách hàng trả lại hàng và cải thiện hơn nữa hiệu quả vận hành.
Thúc đẩy hiệu quả vận hành
AMR tăng cường hiệu quả vận hành và tinh giản quy trình làm việc bằng cách loại bỏ nhu cầu can thiệp thủ công. Hệ thống định tuyến tiên tiến của chúng làm giảm việc xử lý và vận chuyển vật liệu, giúp hạ thấp mức tiêu thụ năng lượng và dấu chân carbon của tổ chức. Hoạt động suốt ngày đêm không nghỉ, AMR duy trì mức năng suất cao. Mỗi tác vụ được thực hiện bởi AMR đều chính xác, đảm bảo tính nhất quán và giảm thiểu sai sót do con người. Bằng cách giám sát sản xuất theo thời gian thực, AMR có thể xác định các điểm nghẽn, sự kém hiệu quả và các lỗi quy trình, cho phép ban quản lý thực hiện các điều chỉnh kịp thời và giải quyết các vấn đề tiềm ẩn.
Tăng cường khả năng hiển thị hàng tồn kho
Việc theo dõi hàng tồn kho và thu thập dữ liệu tự động bởi AMR cải thiện đáng kể khả năng hiển thị tồn kho. Được trang bị các cảm biến tinh vi, camera và máy quét mã vạch, AMR thực hiện kiểm kê kho chính xác, nhanh chóng và cung cấp cập nhật thời gian thực về mức tồn kho và vị trí. Khả năng hiển thị được nâng cao giúp duy trì mức tồn kho tối ưu, tránh tình trạng thừa hàng hoặc thiếu hàng gây tốn kém. Dữ liệu được thu thập bởi AMR cung cấp những hiểu biết giá trị về việc sử dụng hàng tồn kho, cho phép doanh nghiệp đưa ra quyết định đặt hàng sáng suốt và hiểu rõ hơn về động lực chuỗi cung ứng. Phân tích dữ liệu này giúp xác định các mô hình và xu hướng, cho phép xử lý đơn hàng hiệu quả hơn và chuẩn bị cho những thay đổi của doanh nghiệp. Cuối cùng, điều này dẫn đến một hoạt động hiệu quả về chi phí và năng suất hơn.
Đảm nhận các tác vụ nặng nhọc
AMR đóng vai trò quan trọng trong việc giảm bớt gánh nặng cho nhân viên khỏi các tác vụ nặng nhọc, đòi hỏi thể lực và tiềm ẩn rủi ro. Bằng cách xử lý việc di chuyển các mặt hàng lớn và cồng kềnh, AMR cải thiện an toàn nơi làm việc, giảm nguy cơ chấn thương và giải phóng nhân viên để tập trung vào các tác vụ liên quan đến lập kế hoạch và giải quyết vấn đề. Khi AMR quản lý việc di chuyển pallet, nhân viên có thể tập trung nhiều hơn vào kiểm soát chất lượng và xử lý đơn hàng. Hơn nữa, việc sử dụng AMR nâng cao trình độ kỹ năng của lực lượng lao động, cho phép nhân viên dành nhiều thời gian hơn để phát triển kỹ năng của họ và đề xuất các giải pháp thực tế. Sự chuyển đổi này tác động tích cực đến tinh thần và thái độ của người lao động, vì nhân viên có thể tham gia vào việc lập kế hoạch chiến lược, đào tạo và lập trình cho AMR. Khi nhân viên trở nên quen thuộc hơn với AMR, họ sẽ được trang bị tốt hơn để thích ứng với những đổi mới và thay đổi tại nơi làm việc.

Tinh giản việc hoàn tất đơn hàng
Hoàn tất và thu gom đơn hàng là một trong những tác vụ tốn thời gian nhất trong vận hành. Việc triển khai AMR cải thiện đáng kể các quy trình này, dẫn đến việc xử lý đơn hàng nhanh hơn và chính xác hơn. AMR xử lý hiệu quả các tác vụ như lấy hàng, đóng gói và vận chuyển, từ đó giảm thời gian cần thiết để chuẩn bị một đơn hàng.
Tương lai Tương lai của các hoạt động sản xuất, kho bãi và bán lẻ ngày càng phụ thuộc vào robot di động tự trị. Các tổ chức thuộc mọi quy mô và ngành nghề sẽ cần hiểu cách thức hoạt động của AMR và cách chúng có thể nâng cao hiệu quả vận hành. Trong thập kỷ qua, các hoạt động kinh doanh đã phát triển với sự tích hợp của các công nghệ mới, và xu hướng này sẽ tiếp tục khi chúng ta tiến gần đến giữa thế kỷ. Những công ty không chấp nhận công nghệ AMR có nguy cơ bị tụt lại phía sau.
Sự thay đổi Thay đổi là một khía cạnh tất yếu của các thực hành kinh doanh thành công. Những quy trình từng hiệu quả vài năm trước có thể trở nên lỗi thời, nhường chỗ cho các phương pháp hiệu quả và dễ thích nghi hơn. AMR được thiết kế để phát triển cùng với bối cảnh kinh doanh đang thay đổi. Khi các cơ sở được cập nhật và thiết kế lại, AMR có thể được lập trình lại và điều chỉnh lại để phù hợp với các động lực vận hành mới.
Kết luận
-
Robot di động tự trị (AMR) là một cơ chế tự hành, tự cấp nguồn được thiết kế để thực hiện các tác vụ lặp đi lặp lại hoặc các chức năng tổ chức bằng hệ thống dẫn đường nội bộ.
-
Với sự tiến bộ nhanh chóng của trí tuệ nhân tạo (AI) và các loại phần mềm máy tính, các công ty xử lý vật liệu đã có thể phát triển các robot di động tự trị có thể di chuyển trong cơ sở mà không cần dây dẫn, băng keo hoặc cơ chế dẫn hướng.
-
SLAM là thuật ngữ chung được sử dụng để mô tả một loạt các thuật toán và phương pháp tiếp cận kỹ thuật. Các loại SLAM khác nhau bao gồm Graph, EKF, Fast, Topological, Visual, 2D và 3D LiDAR, và Oriented FAST and Rotated BRIEF (ORB) SLAM.
-
Trọng tâm chính của ngành công nghiệp AMR là hỗ trợ khách hàng bằng cách cung cấp các giải pháp cải thiện hiệu quả của nhân viên liên quan đến việc lấy hàng, xác định vị trí và di chuyển sản phẩm cũng như hàng tồn kho.
-
Mặc dù AMR tương tự như AGV, chúng khác nhau về mức độ linh hoạt và tự chủ. Chúng có khả năng tự tạo lộ trình và tìm ra cách hiệu quả nhất để thực hiện nhiệm vụ. Hiệu quả của AMR giúp các quy trình và quy trình làm việc trở nên hiệu quả và năng suất hơn so với các phương pháp thủ công truyền thống.